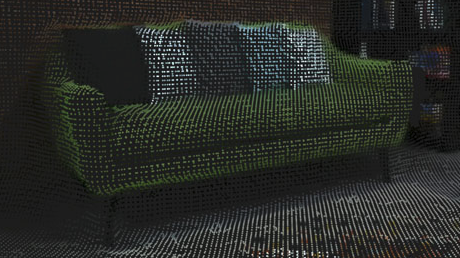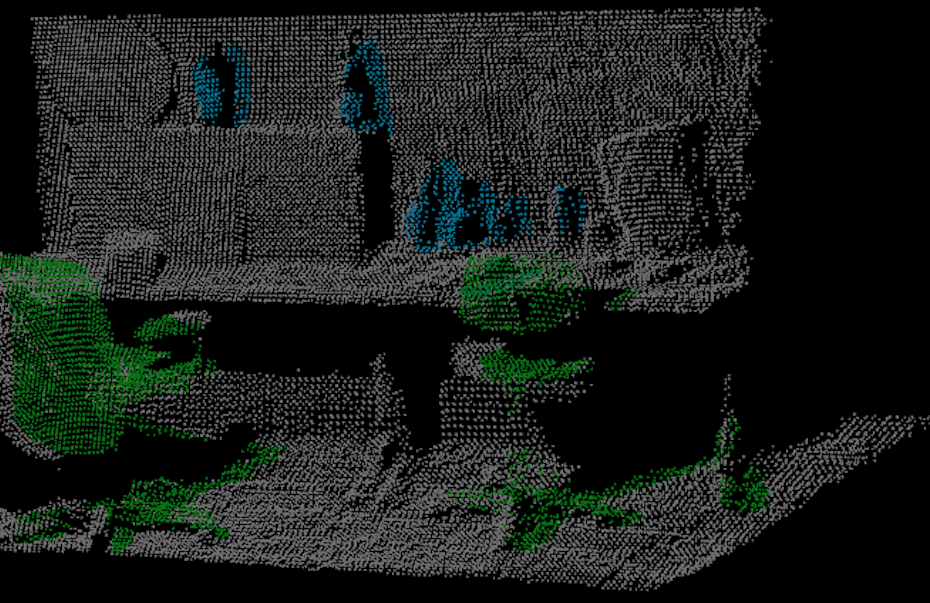
Point Cloud Segmentation using Projection: A ROS Implementation

This paper implements a ROS package for segmenting Point Clouds using Gradual Point Cloud Processing (GPCP). The implementation is integrated with RTAB-Map to produce a segmented point cloud of the environment. The RGB-D SLAM Dataset was used to validate the… Read More »Point Cloud Segmentation using Projection: A ROS Implementation