Mobile Robot Path Planning in Dynamic Unknown Environments using Particle Swarm Optimization

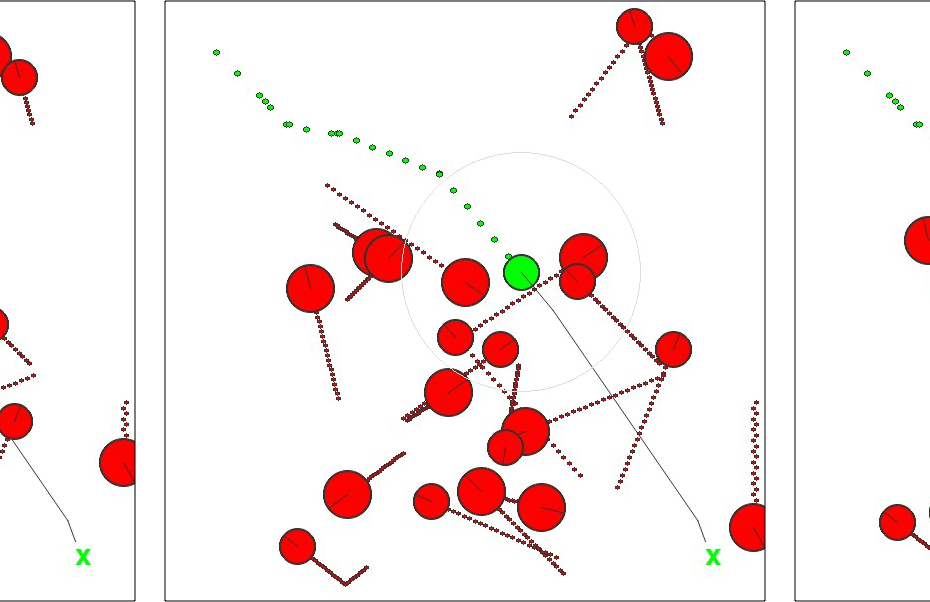
Mobile robot path planning is one of the most essential problems in robotics. This work proposes a novel PSO-based method for mobile robot local path planning in dynamic unknown environments. Using this method, the robot is able to accelerate or… Read More »Mobile Robot Path Planning in Dynamic Unknown Environments using Particle Swarm Optimization